

SOBRE A TURMA 2013039 E O PROJETO
Os docentes do CTS Automação e Simulação, Roberto Lopes, Marlos Antonio, Allan Teixeira, dentre outros, com a ajuda da gerência da instituição, deram a oportunidade da turma 2013039 do curso técnico de Automação Industrial de fazer um grande projeto final, com direito a todos os recursos disponíveis. Com um prazo muito curto, foi bolado pelos instrutores um processo o qual a turma, separada em equipes, deverá realizar.
O projeto tem como objetivo moldar os alunos para o mercado de trabalho, visando não somente as competências técnicas, como também as questões comportamentais. O prazo é de um mês e a turma deve realizar a seguinte atividade dentro desse período:
DESCRITIVO PRELIMINAR DO PROJETO
BREVE DESCRIÇÃO DO PROCESSO
O sistema deve ser capaz de realizar o seguinte processo: O operador deve selecionar a quantidade e o peso das peças que devem ser transportadas da base de início até o armazém. Caso a peça colocada na base de início, após a verificação automática, não atenda o que foi ajustado previamente, o sistema deverá devolver a mesma para a base de descarte, neste caso, o operador deve fazer a correção e repetir a operação.
O processo deverá parar em duas situações: O número de peças ajustado ter sido alcançado ou o operador tenha cancelado a operação. Os comandos e ajustes devem ser inseridos pelo operador através de uma IHM, que deve ser instalada no local (Modo local) ou por um Computador (Modo remoto) através de um software supervisório.
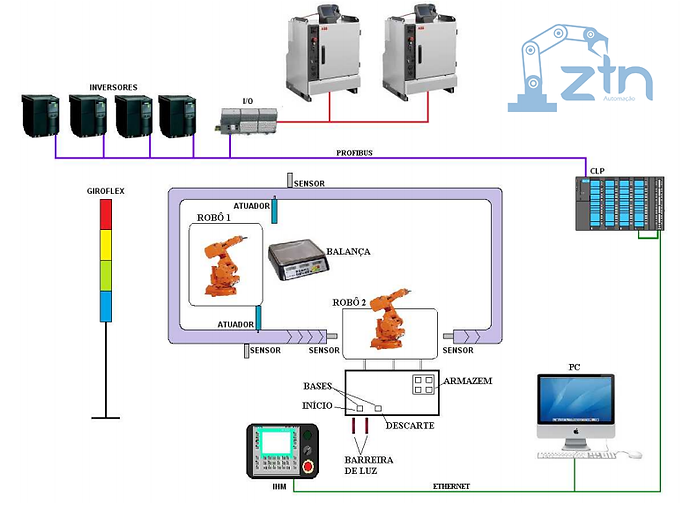
PRINCIPAIS PARTES DO SISTEMA
Robô 2 – Responsável pela retirada da peça da base de início para esteira/ Pela retirada da peça da esteira para a base de descarte ou para uma das quatro posições do armazém.
Robô 1 – Responsável pela retirada da peça da esteira para a balança/ Pela retirada da peça da balança para esteira para o mesmo lado da esteira ou para o lado oposto.
Balança – Verifica se a peça está dentro da especificação de peso determinado pelo operador. Esteira – transportar a peça em ambas as direções conforme a necessidade do processo.
CLP – Controlador principal do sistema.
Drivers – Inversores de freqüências que auxiliam no acionamento dos motores da esteira.
I/O Remota – Auxilia a comunicação dos controladores dos robôs com o CLP.
Sistema Supervisório – O sistema supervisório deve ser composto por um Computador (PC), uma IHM e um sinalizador tipo giroflex.
